UHD938移動(dòng)式超高清隱形自動(dòng)升降
1.USB3.0高速3D專用超高清相機(jī):進(jìn)口USB3.0高速超高清相機(jī),帶溫度補(bǔ)償,確保高溫,嚴(yán)寒氣候下,獲得高精度檢測(cè)�。不怕光,在各種光線條件下均可正常工作�����。
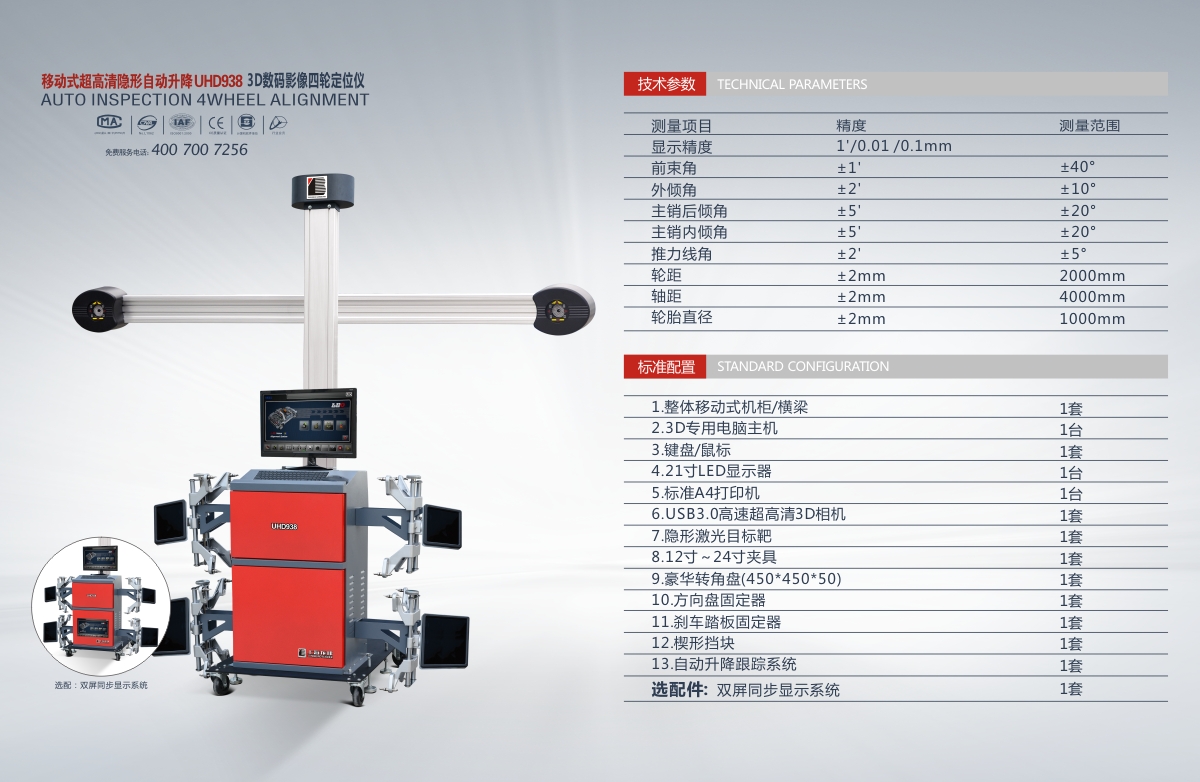
2.移動(dòng)式機(jī)柜/橫梁:四輪定位儀可以整體移動(dòng)到您需要的任意地方,包括室外,方便-機(jī)多用�。
3.自主知識(shí)產(chǎn)權(quán):完全自主知識(shí)產(chǎn)權(quán)3D四輪定位軟件,登記號(hào)2014SR005769�����。自主研發(fā)的3D四輪定位軟件,可獲得功能�、界面、數(shù)據(jù)庫(kù)永續(xù)升級(jí),消除客戶后顧之憂��。適合國(guó)內(nèi)用戶使用的操作界面��,易學(xué)�、易懂、易操作�。
4.自動(dòng)升降系統(tǒng): 3D自適應(yīng)跟蹤系統(tǒng),根據(jù)舉升機(jī)/目標(biāo)靶高度,定位儀自動(dòng)調(diào)節(jié)相機(jī)橫梁高度,確保相機(jī)/目標(biāo)靶測(cè)量系統(tǒng),始終處于最佳測(cè)量狀態(tài),保證測(cè)量結(jié)果的準(zhǔn)確性。進(jìn)一步提高用戶檢測(cè) ,調(diào)整車輛時(shí)舒適度,客戶可以在低矮處檢測(cè),舉升機(jī)升高后調(diào)整�。
5.遠(yuǎn)程客服系統(tǒng): -鍵遠(yuǎn)程維護(hù),實(shí)時(shí)添加,升級(jí)數(shù)據(jù)。遠(yuǎn)程實(shí)時(shí)教學(xué),在線培訓(xùn),在線指導(dǎo)�。遠(yuǎn)程在線故障診斷,排除。
6.高清廣角鏡頭:進(jìn)口高清鏡頭,視域?qū)拸V, 滿足超長(zhǎng),超寬車輛檢測(cè)�����。
7.雙相機(jī)測(cè)量系統(tǒng):二個(gè)3D專用超高清工業(yè)數(shù)碼像機(jī),四個(gè)目標(biāo)靶構(gòu)成測(cè)量系統(tǒng)�����。
8.高強(qiáng)度隱形激光目標(biāo)靶:目標(biāo)靶保護(hù)屏由進(jìn)口特殊材料制成,堅(jiān)固耐用,隱形抗干擾,激光靶,精度高。靶_ 上無(wú)電子元器件�����、無(wú)電池��、無(wú)需數(shù)據(jù)傳輸,徹底消除故障源,降低使用維護(hù)成本��。
9.超短超窄安裝距離:安裝場(chǎng)地要求低,相機(jī)到前輪距離可短至: 1.5米�����。普通寬度四柱也可滿足測(cè)量要求�。
10.LED光學(xué)指示系統(tǒng):用戶無(wú)需看電腦屏幕,根據(jù)相機(jī)上智能LED狀態(tài)指示燈,就能完成準(zhǔn)確的定位操作。
11.動(dòng)態(tài)測(cè)量:滾動(dòng)車輪,車身處于自然狀態(tài),實(shí)時(shí)檢測(cè)”車輛定位基準(zhǔn)面”, 自動(dòng)消除舉升機(jī)不水平,夾具裝夾帶來(lái)的偏差�����。
12.靜態(tài)快速測(cè)量:獨(dú)特的”自學(xué)習(xí)測(cè)量系統(tǒng)”, 確保不推車靜態(tài)測(cè)量時(shí)獲得有效的四輪定位數(shù)據(jù)��。當(dāng)車輛超長(zhǎng)或舉升機(jī)較短時(shí),均可獲得有效的四輪定位數(shù)據(jù)�����。
13.二輪定位系統(tǒng):二輪定位系統(tǒng)幫助客戶快速檢測(cè)車輛定位狀況�。
14.舉升機(jī)水平測(cè)量系統(tǒng):借助目標(biāo)靶可以準(zhǔn)確測(cè)量舉升機(jī)的水平狀態(tài)。
15.底盤(pán)參數(shù)測(cè)量系統(tǒng):可準(zhǔn)確測(cè)量車身底盤(pán)參數(shù),輪胎直徑�。方便客戶進(jìn)一步判斷汽車底盤(pán)情況及輪胎磨損情況。
16.即裝即用:出廠時(shí)設(shè)備已嚴(yán)格標(biāo)定完畢,到現(xiàn)場(chǎng)安裝即可使用�����。
17現(xiàn)場(chǎng)校正:設(shè)備如需校正,現(xiàn)場(chǎng)進(jìn)行��。無(wú)需返廠,節(jié)省用戶等待時(shí)間�����。
18.雙屏同步顯示系統(tǒng):上下二個(gè)顯示器,同步顯示測(cè)量調(diào)整畫(huà)面,方便客戶調(diào)整車輛后輪數(shù)據(jù)�����。( 可選功能)
成像原理:
將目標(biāo)靶安裝在車輛的四個(gè)輪輞之.上,滾動(dòng)車輪,由3D數(shù)碼像機(jī)對(duì)目標(biāo)靶上的幾何圖形進(jìn)行連續(xù)拍攝通過(guò)計(jì)算機(jī)對(duì)幾何圖形的變化進(jìn)行分析運(yùn)算,找出" 車輛定位基準(zhǔn)面”, 再根據(jù)“車輪平面”與"定位基準(zhǔn)面”之間的對(duì)應(yīng)關(guān)系,得出車輪及底盤(pán)等的相應(yīng)定位參數(shù)��。

式超高清隱形自動(dòng)升降 UHD938")
